Stereoscopic Cameras

Empowering machine vision and robotics industry
Leopard Imaging’s 3D stereo cameras are commonly used in applications such as machine vision and robotics, where the ability to perceive depth is important. We are effectively empowering the stereoscopic technology with our custom 3D stereo camera solutions.
In machine vision applications, stereo cameras can be used to perform tasks such as object recognition, distance measurement, and 3D mapping. For example, a stereo camera system could be used to guide a robot arm to pick up an object or to measure the dimensions of a physical object for quality control purposes.
In robotics, stereo cameras can be used to make them autonomous by enabling the robot to perceive its environment in three dimensions. This can allow the robot to navigate through a space, avoid obstacles, and interact with its surroundings in a more natural and intelligent way. For example, a robot equipped with stereo cameras could be used for tasks such as surveillance, inspection, and search and rescue.
Work with high-definition video output
One of the best things about Leopard Imaging’s 3D stereo cameras is the resolution, which determines the amount of detail the camera can capture in an image. Our high-resolution 3D stereo cameras are able to capture more detailed images and videos, which can be important for applications such as object recognition, distance measurement, motion perception, medical imaging, and 3D mapping.
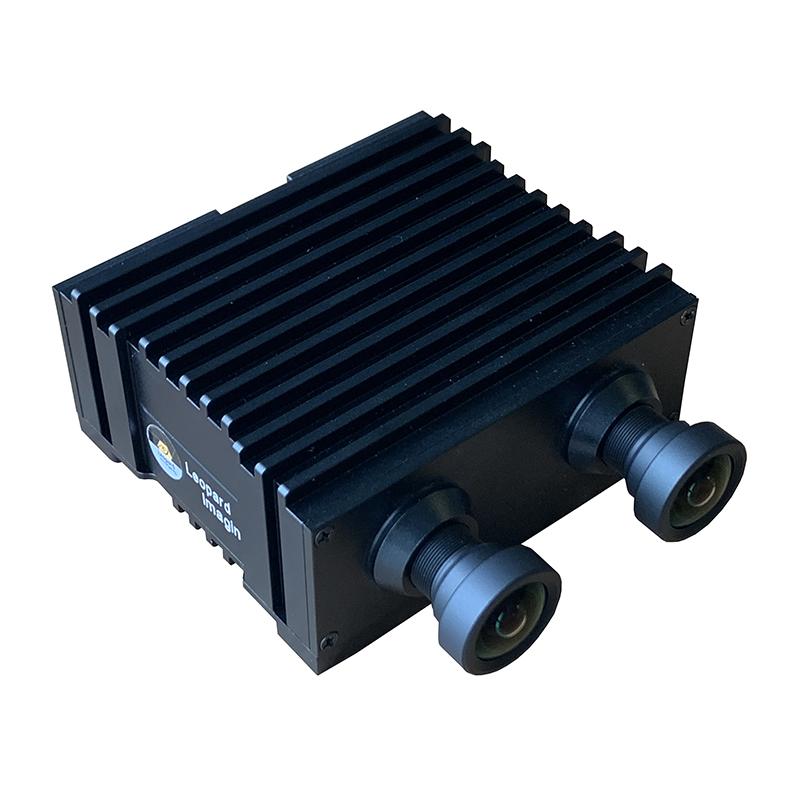
Leopard Imaging Hawk 3D Depth Camera
")
The Hawk Camera offers a wide horizontal field of view of 120 and integrates dual OnSemi AR0234CS RGB image sensors with an active-pixel array of 1920 (H) x 1200(V) to support full HD video up to 120 fps. The dual performance in any high-vibration environments that the robot may encounter. This is coupled with a 6-axis IMU for highly accurate (sub-microsecond) timestamping of the camera frames relative to the IMU which is needed for high-precision robotics perception.
Click Here to view the Hawk Camera

LI-ASTRO-VB1940-VCL-DTOF-ST80-10GigE-120H

LI-X5C-ST100-FUSION-GMSL2-120H

LI-ASTRO-AR0234-ST150-10GigE-120H
LI-VB1940-ST100-FUSION-GMSL2-120H

LI-OG05B20-AF0130-GMSL2-085H

LI-AF0130-VCL-GM2B-085H

LI-OX05C1S-ST80-MIPI-143H

LI-ASTRO-VB1940-VCL-ST80-10GigE-120H

LI-VB1940-VCL-ST100-10GigE-120H-POE

LI-VB1940-VCL-ST80-10GigE-120H
LI-VB1940-VCL-ST80-10GigE-120H-POE

LI-VB1940-GM2C-120H

LI-VB1940-ST100-10GigE-120H-POE

LI-ISX031-ST80-10GigE-118H

LI-VB1940-ST100-10GigE-120H

LI-IMX715-MIPI-D-HOLOSCAN-080H

LI-IMX274-MIPI-D-HOLOSCAN-090H
LI-JETSON-IMX715-DUAL-080H

LI-USB30-AR0234CS-ST100-GM2C-120H

LI-AR0234CS-ST100-GM2C-120H

LI-AR0234CS-ST75-GM2C-120H

LI-USB30-AR0234CS-ST75-GM2C-120H

LI-USB30-AR0234CS-ST55-GM2C-120H

LI-AR0234CS-ST55-GM2C-120H

LI-VB1940-GM2C-137H

LI-OV580-OG01A1BST

LI-AR0234CS-STEREO-GMSL2-30

LI-USB30-AR0234CS-STEREO-GMSL2-30
LI-M10V-DUAL-USB30

LI-AR0144-MIPI-STEREO
LI-JETSON-IMX274-DUAL-090H

LI-OV580-OV7251ST

LI-OV580-OV9782ST
LI-OV580-OV9281ST