We at Leopard Imaging, in partnership with Nova Carter, are announcing the release of Nova Carter 36, a reference AMR for robotics development and research, at ROSCon.
This new release showcases Leopard Imaging’s cutting-edge Hawk 3D Depth Camera, created in collaboration with NVIDIA to provide cost-effective 3D stereo imaging for edge AI and robotics applications. With a 120-degree field of view enabled by dual OnSemi AR0234CS sensors, the Hawk Camera captures 1920 x 1200 resolution images at a rapid 120 fps and integrates a 6-axis IMU for precise timestamping of frames. As an NVIDIA Jetson Elite Partner, Leopard Imaging utilizes active alignment technology and robust manufacturing capabilities. The camera is fully integrated into Nova Carter projects through Leopard Imaging’s services. Target applications include barcode scanning, biometrics, machine vision, VR/AR, and more. This partnership represents a significant advancement in robotics and autonomous systems, enabled by Leopard Imaging’s state-of-the-art camera solutions.
- Leopard Imaging has partnered with NVIDIA to create cost-effective 3D stereo imaging solutions for real-time depth perception, aimed at edge AI and robotics applications.
- The Leopard Imaging Hawk 3D Depth Camera has a 120-degree horizontal field of view and integrates dual OnSemi AR0234CS sensors, supporting full HD video at up to 120 fps. The 6-axis IMU enables highly precise timestamping.
- Leopard Imaging utilizes active alignment (AA) technology and robust manufacturing capabilities as an Elite Partner in the NVIDIA Jetson ecosystem.
- The camera is fully integrated with Nova Carter robotics projects and deployments through Leopard Imaging’s integration services.
- Key specs: 1920 x 1200 active pixels, 120 fps at full resolution, 1/2.6″ optical format, 3.0 x 3.0 μm pixel size, 9-19V power supply.
- The part number is LI-AR0234CS-GMSL2-OWL. An EVA USB 3.0 kit is also available.
- Target applications include barcode scanning, gesture recognition, 3D scanning, biometrics, machine vision, VR/AR, and more.
- The partnership represents a significant advancement in robotics and autonomous systems, enabled by Leopard Imaging’s cutting-edge camera solutions.
![]()
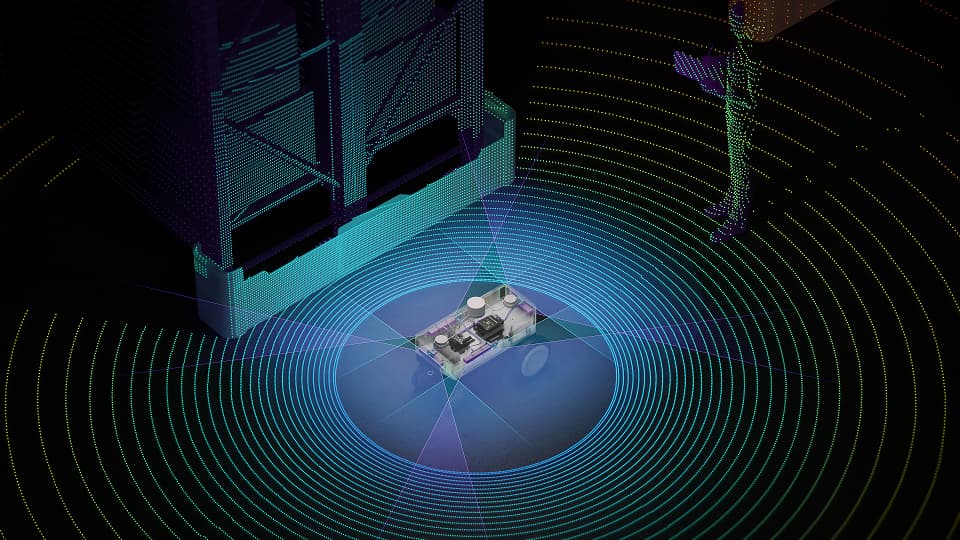
Nova Carter was jointly developed with Segway Robotics 12, for autonomous robotics development including accelerated computing for ROS 2 with full 360° sensing from camera and LIDAR with validation by Open Navigation for use with Nav2.
Nova Carter is powered by a Jetson AGX Orin 2 with additional interface I|O boards developed for robotics. Key features of Nova-Carter include:
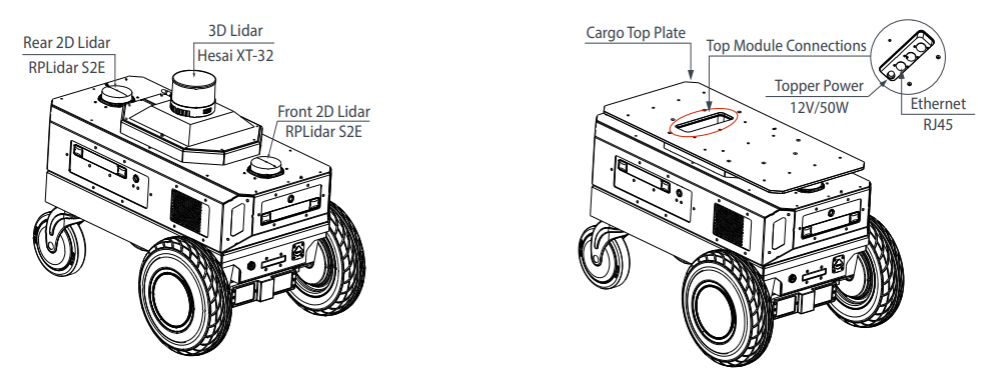
- 1x Hesai XT32 360° 3D LIDAR
- 2x Slamtec RPLidar S2E 2D LIDAR
- 4x Leopard Imaging Hawk 16 2.3mp color global shutter OnSemi AR0234 stereo cameras
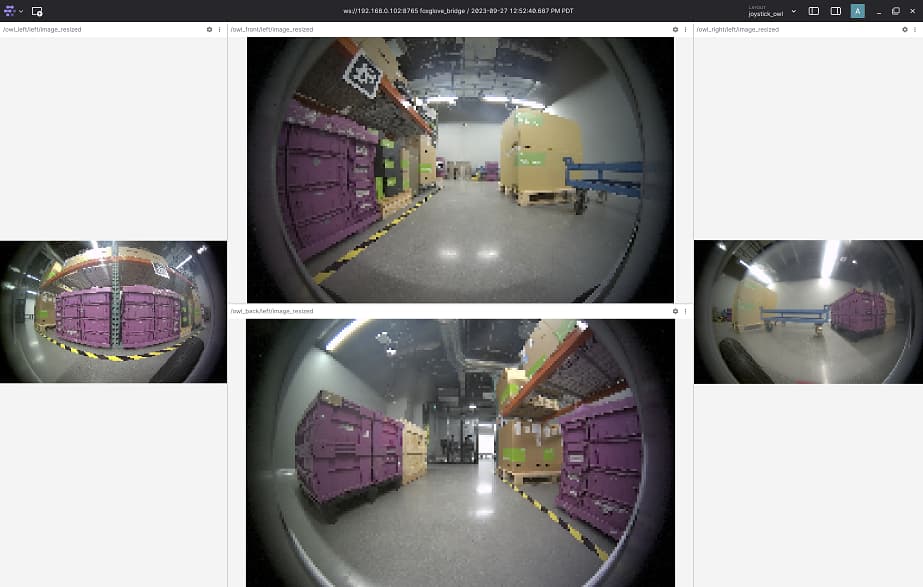
- 4x Leopard Imaging Owl 8 2.3mp color global shutter OnSemi AR0234 fish-eye surround cameras
- High precision time synchronization between sensors using hardware time stamping in Orin, and PTP over ethernet with less than 10us jitter for sensor acquisition time.
- Simultaneous camera capture ensures synchronized 360° vision-based perception across all cameras within 100us from a single capture trigger.
- Chassis-mounted Bosch IMU, Magnetometer, and Barometer
- Samsung 980 PRO 2TB M.2 SSD for sensor data capture at up to 4 GB/sec
- WIFI, Bluetooth, and 10Gbps ethernet for high-performance data upload
- Max speed of 3.3 meters per second
- Up to 8hrs of operational time
- Available charging dock for autonomous charging
The Nova Carter ROS 2 package 5 includes applications for sensor calibration, joystick teleoperation using fish-eye Owl cameras, sensor visualization in RViz or Foxglove, mapping with SLAM toolbox and Nav2, and navigation with Nav2.
To improve autonomy for mobile robots with advanced perception, and AI, a robotics platform with 360° camera and LIDAR perception and highly accurate time synchronization. Nova Carter was designed as a platform leveraging state of the art from autonomous vehicles with adaptation for robotics. By working with Segway Robotics, this platform has been made available for advanced robotics development and research, with the same system software, drivers, hardware, and performance tuning we depend on for our own Isaac ROS 4 work.
Source: www.discourse.ros.org